近日,我院谭国真教授研究团队在机器人操作系统(ROS)领域的最新研究成果“SEAM: An Optimal Message Synchronizer in ROS with Well-Bounded Time Disparity”获得第44届RTSS会议最佳论文奖。据悉,这是自RTSS会议创办的44年以来,首次有来自中国学术机构作为第一单位的研究入选最佳论文。
图1 第44届RTSS会议最佳论文奖: 文章第一作者为孙景昊副教授,合作者包括香港城市大学关楠教授,美国北卡州立大学郭志山教授和东北大学邓庆绪教授。
机器人操作系统 (ROS)是机器人和自主机器领域重要的基础软件框架标准。随着ROS越来越广泛地应用于自动驾驶、工业自动化等安全攸关领域,一个共性挑战问题是:多个传感器的数据由于采样周期和传输时延的不同,在多模态感知过程中难以实现时间同步,造成数据融合的时间偏差,严重影响自主机器感知外界环境的准确性,导致智能机器决策错误,触发严重的安全事故。如何保障ROS系统中多传感器数据融合的时间一致性成为当前人工智能和嵌入式领域的研究前沿和热点。
图2 机器人操作系统广泛应用于自动驾驶、工业自动化等安全攸关领域
在机器人操作系统中,消息同步器、执行器和发布-订阅通信协议三大核心机制对机器人实时性保障起到决定性的作用。研究团队提出一种全新的ROS消息同步器——SEAM,有效解决了在多传感器数据融合中的时间一致性难题。SEAM的主要特点是:无论在何种时间段,都能完成满足时间戳差异阈值的消息同步操作。研究团队从理论上严格证明了SEAM的最优性。实验表明,相比现有的ROS消息同步器,SEAM能将消息融合的成功率提高70%,同时减少了90%的消息同步操作计算时间。SEAM的提出,为工业机器人、自动驾驶、无人系统、人形机器人等具身智能领域的多模态协同感知提供了更高效、更准确、更可靠的时间同步解决方案。
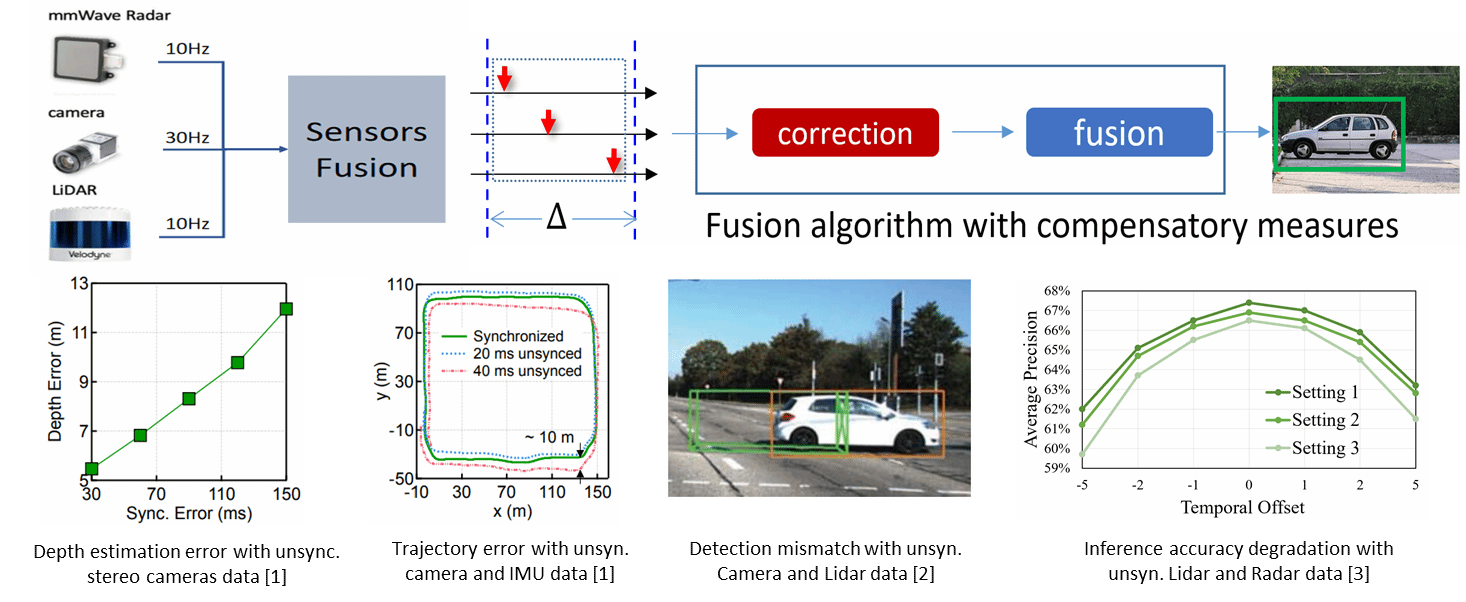
图3 机器人操作系统中多传感器数据融合的时间一致性问题
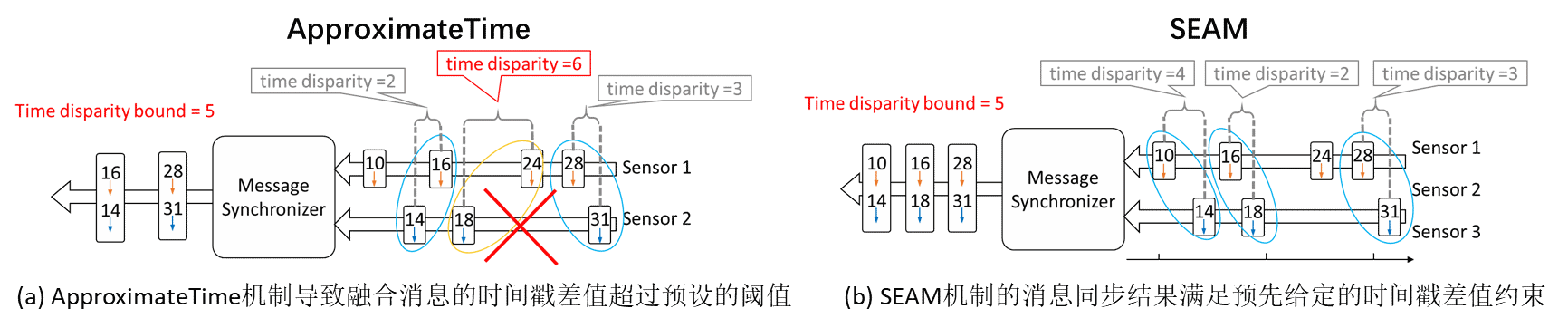
图4 ROS传统消息同步机制(a)和SEAM机制(b)的消息同步原理示意图

图5 SEAM的最优性证明
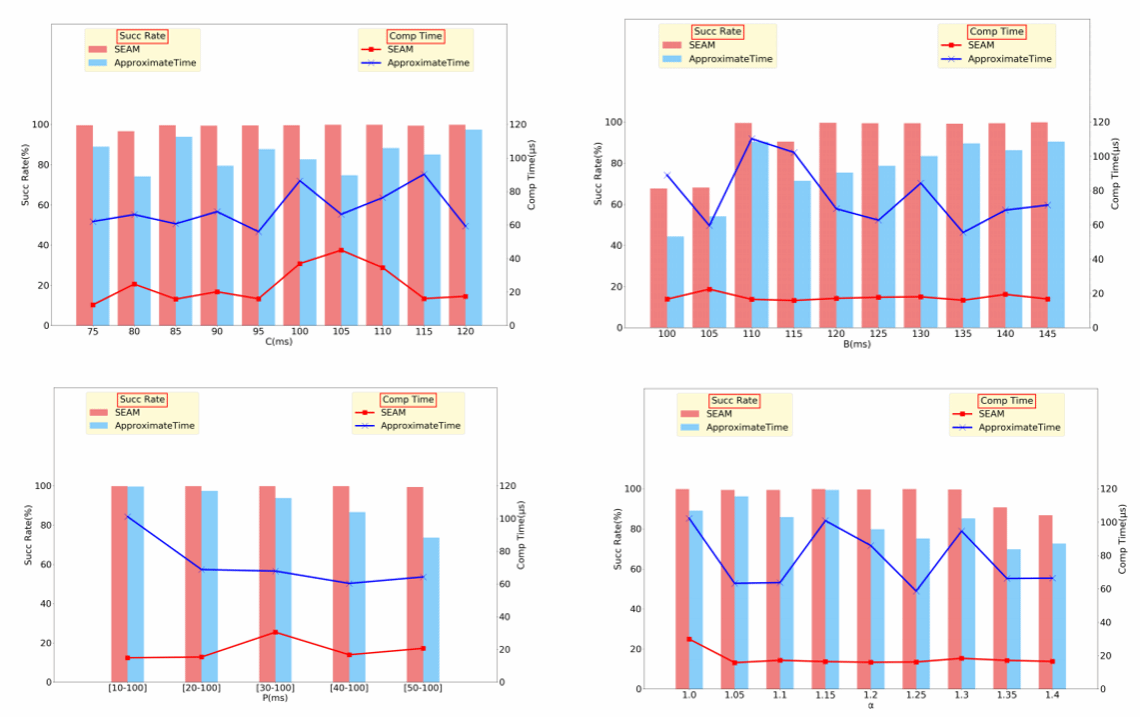
图6 SEAM方法和ApproximateTime方法的实验对比
RTSS会议背景简介
根据CS ranking全球计算机科学权威排名,RTSS、RTAS和EMSOFT是实时系统领域的三大顶级会议。其中,RTSS是实时系统领域排名第一的顶级会议,展示实时领域在理论和实践方面的创新,涵盖实时系统设计、分析、实现、评估和经验的各个方面,包括但不限于操作系统、网络、中间件、编译器、工具、建模、调度、QoS支持、资源管理、测试和调试、硬件/软件协同设计、容错、安全、电源和热管理、嵌入式平台和系统实验和部署经验。
谭国真教授团队自2006年以来,一直研究时间自动机理论和实时系统优化,近年来,主要从事可信任自主智能系统的研究。在大模型时代,机器人操作系统与具身智能的结合是通向AGI的关键技术,这是该团队今后重要的研究方向。孙景昊副教授师从谭国真教授,长期从事实时系统理论研究,先后在实时嵌入式领域顶级会议RTSS、RTAS、EMSOFT以及顶级期刊IEEE Trans on Computer、IEEE Trans on CAD等发表高水平论文20余篇,近三年来,在RTSS会议上均有长文发表,并相继获得RTSS工业挑战最佳解决方案奖、顶会EMSOFT最佳论文奖、顶会RTSS最佳论文奖。

以上工作得到国家自然科学基金面上项目和重点项目资助。