近日,计算机辅助设计国家地方联合工程实验室的尹宝才教授、杨鑫教授、王宇新副教授的关于类脑计算、强化学习、机器人导航避障的3项研究成果陆续被机器学习国际顶级会议(NeurIPS 2022)、机器人领域国际高水平会议(IROS 2021)和多媒体领域高水平期刊IEEE Transactions on Circuits and Systems for Video Technology(TCSVT)接收。
NeurIPS(Conference on Neural Information Processing Systems)是机器学习和计算神经科学相关的学术会议,也是全球最负盛名的机器学习与人工智能领域顶级学术会议,被中国计算机学会(CCF)列为A类会议。根据当前流行的Google Scholar Citation统计,NeurIPS排在所有学科目录第10位(Nature第1位,Science第3位,Cell第8位)。
IROS(International Conference Intelligent Robots and Systems),是机器人与智能系统领域最著名、影响力最大的顶级学术会议之一。由IEEE机器人与自动化协会、IEEE工业电子协会等五个协会发起,内容涉及机器人运动学及动力学、智能控制、传感器、人与机器人的交互协作,多机器人协作等多个机器人学及相关的学术与技术领域。
IEEE Transactions on Circuits and Systems for Video Technology(TCSVT)是IEEE旗下视频技术领域顶级学术性汇刊之一,中科院1区期刊,在相关领域具有重要的影响力(IF:5.859)。该期刊发表的论文主要方向为面向图像视频信号的采集、表示和显示,处理、滤波和变换,分析和合成,学习和理解,压缩、传输和通信,存储和检索,硬件/软件设计和实现等。
研究成果1:硕士生丁建川作为第一作者与硕士生周运铎等人共同完成的研究成果“Biologically Inspired Dynamic Thresholds for Spiking Neural Networks”致力于维持退化环境下脉冲模型的内在可塑性稳态,为缩小生物学和机器学习领域之间的差距提供了帮助。本工作设计了一个生物合理的动态能量-时间阈值来实现神经元的内在可塑性,使其能够维持网络的稳态。动态脉冲阈值是生物神经元的基本属性之一,是维持神经元内在平衡的调节机制,在生物学中有广泛的应用,但很少应用在计算机领域,尤其是在脉冲模型中。本工作构建了生物合理的动态能量时间阈值,基于此模型,机器人能够有效地适应不同的退化环境,使其在具有噪声干扰的场景下,依然保持高效的避障导航决策。该模型不仅适用于机器人避障任务,同时也可以通过简单的微调部署在强化学习连续控制任务、图像分类等任务中。因此,本工作为类脑智能方向提供了一种更加高效、鲁棒的脉冲模型,缩小了生物学和机器学习领域之间的差距。本工作被机器学习与人工智能顶会NeurIPS 2022录用。
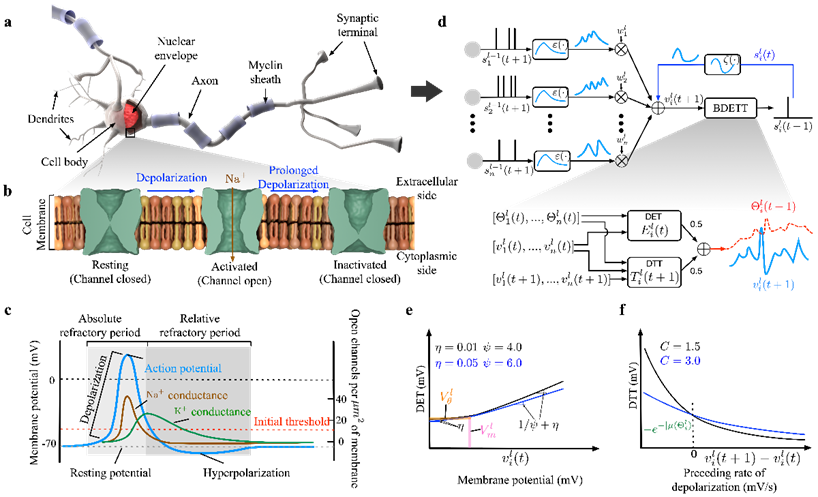
动态能量-时间阈值整体框架
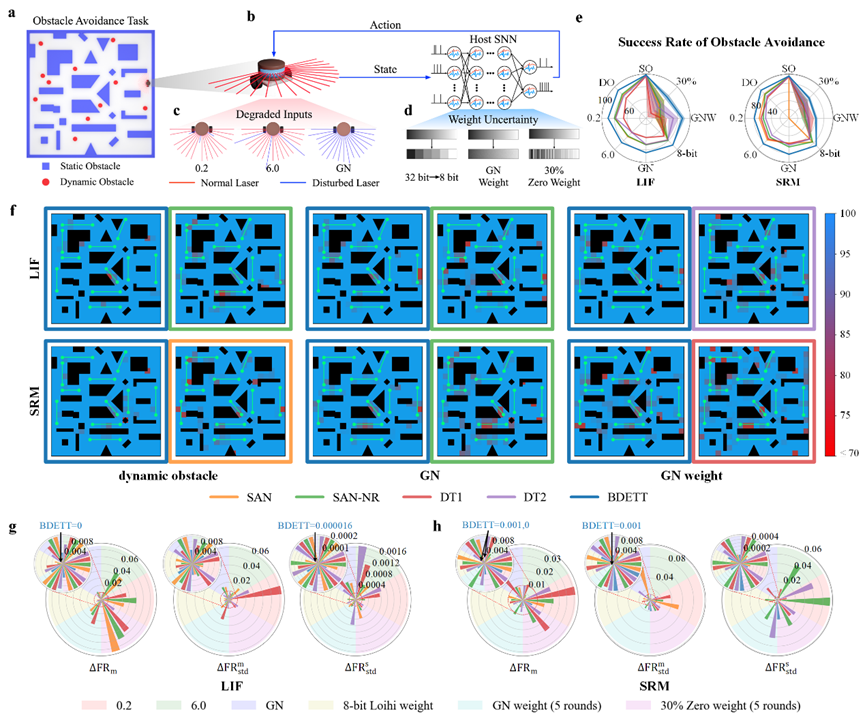
机器人导航避障实验结果
研究成果2:硕士生高令平和硕士生丁建川作为共同第一作者完成的研究成果“A vision-based irregular obstacle avoidance framework via deep reinforcement learning”致力于解决基于强化学习框架的室内复杂场景下移动机器人的视觉避障问题,增加了避障模型的安全高效性。深度强化学习在基于激光的防撞工作中取得了巨大的成功,因为激光可以在没有过多冗余数据的情况下感知准确的深度信息,在从模拟环境迁移到现实世界时可以保持算法的鲁棒性。然而,高成本的激光设备难以大规模应用。本工作提出了一种基于视觉的避障框架实现移动机器人在复杂未知环境中的自主避障。结果表明,该框架在几个未见的虚拟和现实世界场景中实现了最先进的性能。此项研究成果具有广泛的应用价值,所提出的复杂自主避障方法有助于推动机器人技术在军事、消防、救援、物流等方面的使用, 尤其是在具有挑战、困难的场景下。本论文被机器人领域高水平会议IROS 2021录用。
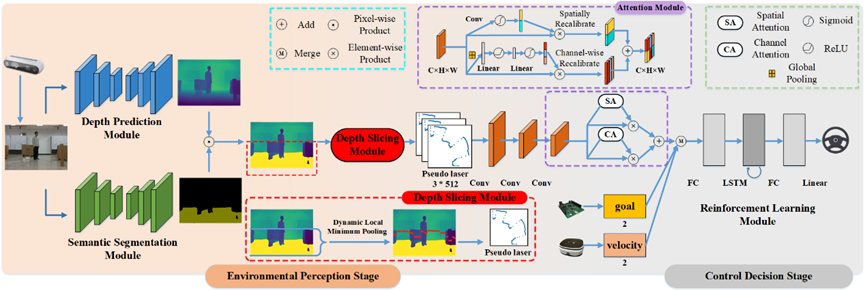
单目避障框架整体流程图
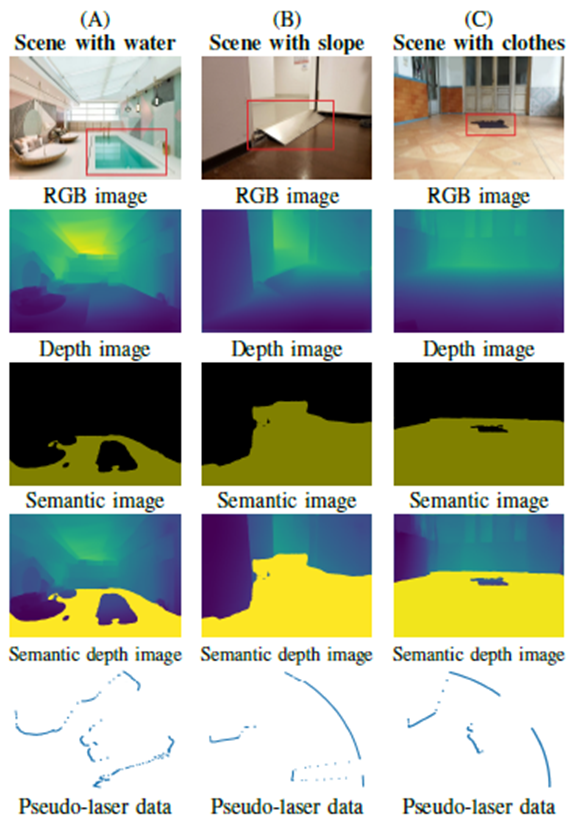
伪激光数据生成过程与可视化
研究成果3: 硕士生丁建川作为第一作者与硕士生高令平等人共同完成的研究成果“Monocular Camera-based Complex Obstacle Avoidance via Efficient Deep Reinforcement Learning”采用单目RGB相机作为传感器来感知环境,并提出一种新的数据表示形式“伪激光数据”。结合了RGB数据具有语义信息的优势以及激光数据简洁的优势,增强对复杂障碍物的感知能力,同时针对深度强化学习的状态信息设计特征提取指导模块,根据距离和速度数据对伪激光状态进行加权,代替了强化学习初始的盲目探索过程,使其具有较强的针对性,加速了网络学习的收敛速度,以此进行更高效的强化学习模型训练。通过此方法,使机器人可以应对室内复杂不规则障碍,如桌椅、货架等,以及地面障碍物,如衣物、水渍等。从而使机器人适应更为复杂的避障导航场景,完成对复杂场景的充分高效的感知,保证导航避障决策的有效性。该工作被多媒体领域高水平期刊IEEE Transactions on Circuits and Systems for Video Technology(TCSVT)录用。
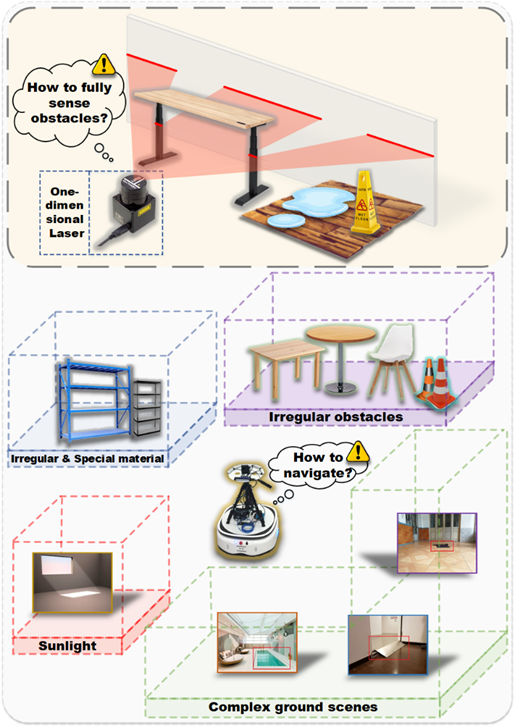
复杂避障导航环境
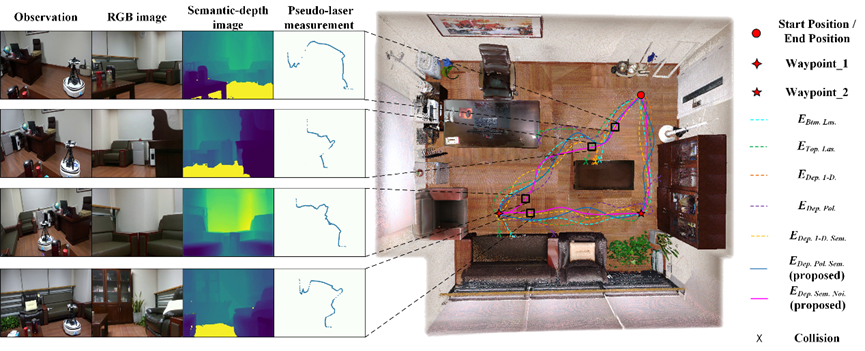
办公室场景导航避障结果可视化
上述研究工作得到科技创新2030“脑科学与类脑研究”重大项目“多模态多尺度协同的神经可塑性类脑强化学习网络模型设计与应用研究”、国家重点研发计划“跨媒体知识泛化及知识图谱构建方法”和国家自然科学基金面上项目“高速且复杂光照环境下建筑物内部场景视觉快速重定位方法研究”等的支持。
详细工作请参见主页: http://faculty.dlut.edu.cn/yangxin/zh_CN/index.htm 和 https://xinyangdut.github.io/
[1] Biologically Inspired Dynamic Thresholds for Spiking Neural Networks. Conference on Neural Information Processing Systems (NeurIPS) 2022.
[2] A vision-based irregular obstacle avoidance framework via deep reinforcement learning. International Conference Intelligent Robots and Systems (IROS) 2021.
[3] Monocular Camera-based Complex Obstacle Avoidance via Efficient Deep Reinforcement Learning. IEEE Transactions on Circuits and Systems for Video Technology (TCSVT) 2022.